다목적 서비스 로봇의 휴먼-로봇 인터랙션 디자인
본 연구는 서빙, 안내, 교육, 돌봄, 방역 등 다양한 곳에서 서비스 하고 있는 로봇이 어떻게 우리 인간과 원활한 인터랙션을 할 지에 대한 구체적인 로봇 HRI 디자인을 제시하는 연구이다.
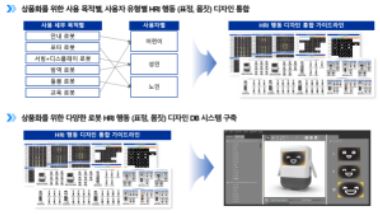
각 연령대의 사용자(어린이, 성인, 노인)와 직접 상호작용하는 서비스 로봇의 경우, 연령층에 적합한 인터랙션 요소가 중요하다. 로봇이 연령층에 맞는 인터랙션 요소를 통해 의사소통하면, 더 친근하고 접근하기 쉬운 존재로 인식되며 의사소통의 효율성도 높아진다. 본 연구는 다양한 로봇 서비스 목적에 적합한 인터랙션 디자인을 도출하여 폭넓은 의사소통을 가능하게 한다.







